การควบคุมรีเลย์โดยใช้ไมโครคอนโทรลเลอร์ วงจรควบคุมรีเลย์ ไดรเวอร์รีเลย์อย่างง่าย
สวัสดี Geektimes!
การควบคุมโหลดที่ทรงพลังเป็นหัวข้อยอดนิยมในหมู่ผู้คนที่เกี่ยวข้องกับระบบอัตโนมัติในบ้านไม่ทางใดก็ทางหนึ่งและโดยทั่วไปโดยไม่คำนึงถึงแพลตฟอร์ม: ไม่ว่าจะเป็น Arduino, Rapsberry Pi, Unwired One หรือแพลตฟอร์มอื่น ๆ ให้เปิดและปิดบางส่วน ไม่ช้าก็เร็วจะต้องใช้ฮีตเตอร์ หม้อต้มน้ำ หรือพัดลมท่อ
ภาวะที่กลืนไม่เข้าคายไม่ออกแบบดั้งเดิมที่นี่คือสิ่งที่ต้องเดินทางด้วย ดังที่หลายคนได้เรียนรู้จากประสบการณ์ที่น่าเศร้าของพวกเขา รีเลย์ของจีนไม่มีความน่าเชื่อถือที่เหมาะสม - เมื่อเปลี่ยนโหลดอุปนัยอันทรงพลัง หน้าสัมผัสจะเกิดประกายไฟอย่างแรง และเมื่อถึงจุดหนึ่งพวกมันอาจติดขัด คุณต้องติดตั้งรีเลย์สองตัว - อันที่สองเพื่อป้องกันการเปิด
แทนที่จะติดตั้งรีเลย์คุณสามารถติดตั้งรีเลย์ triac หรือโซลิดสเตตได้ (โดยพื้นฐานแล้วจะเป็นไทริสเตอร์หรืออุปกรณ์เอฟเฟกต์สนามเดียวกันกับวงจรควบคุมสัญญาณลอจิคัลและออปโตคัปเปลอร์ในแพ็คเกจเดียว) แต่มีข้อเสียอีกประการหนึ่ง - พวกมันร้อนขึ้น ดังนั้นจึงจำเป็นต้องมีหม้อน้ำซึ่งจะเพิ่มขนาดของโครงสร้าง
ฉันอยากจะบอกคุณเกี่ยวกับเรื่องที่เรียบง่ายและชัดเจน แต่ในขณะเดียวกันก็ไม่ค่อยเห็นรูปแบบที่สามารถทำได้:
- การแยกอินพุตและโหลดแบบกัลวานิก
- การสลับโหลดอุปนัยโดยไม่มีกระแสและแรงดันไฟกระชาก
- ไม่มีการสร้างความร้อนอย่างมีนัยสำคัญแม้ใช้กำลังไฟสูงสุด
แต่ก่อนอื่นมีภาพประกอบบางส่วน ในทุกกรณี มีการใช้รีเลย์ TTI ของซีรีส์ TRJ และ TRIL และใช้เครื่องดูดฝุ่น 650 W เป็นโหลด
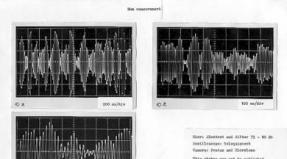
รูปแบบคลาสสิก - เราเชื่อมต่อเครื่องดูดฝุ่นผ่านรีเลย์ปกติ จากนั้นเราเชื่อมต่อออสซิลโลสโคปเข้ากับเครื่องดูดฝุ่น (ข้อควรระวัง! ไม่ว่าจะเป็นออสซิลโลสโคปหรือเครื่องดูดฝุ่น - หรือดีกว่านั้น ทั้งสองอย่าง - จะต้องแยกออกจากพื้นดินด้วยกระแสไฟฟ้า! อย่าเอานิ้วหรือไข่ของคุณไปใส่ในเครื่องปั่นเกลือ! อย่าล้อเล่นกับ 220 V!) และดูสิ
รวม:

ฉันต้องใช้แรงดันไฟหลักให้เกือบถึงระดับสูงสุด (การพยายามผูกรีเลย์แม่เหล็กไฟฟ้าเข้ากับการข้ามศูนย์ถือเป็นงานหายนะ: มันช้าเกินไป) คลื่นสั้นที่มีส่วนหน้าเกือบเป็นแนวตั้งดังขึ้นทั้งสองทิศทาง และการรบกวนก็บินไปทุกทิศทาง ที่คาดหวัง.
ปิด:

การสูญเสียแรงดันไฟฟ้าอย่างกะทันหันบนโหลดอุปนัยไม่เป็นลางดี - ไฟกระชากจะพุ่งขึ้น นอกจากนี้ คุณเห็นสัญญาณรบกวนนี้ในคลื่นไซน์เป็นมิลลิวินาทีก่อนที่จะปิดเครื่องจริงหรือไม่ นี่คือจุดประกายไฟของหน้าสัมผัสรีเลย์ที่เริ่มเปิด ซึ่งเป็นสาเหตุที่วันหนึ่งพวกมันจะติดขัด
ดังนั้นจึงเป็นการไม่ดีที่จะเปลี่ยนโหลดอุปนัยด้วยรีเลย์ "เปล่า" เราจะทำอย่างไร? ลองเพิ่ม snubber - โซ่ RC ของตัวต้านทาน 120 โอห์มและตัวเก็บประจุ 0.15 µF
รวม:

ดีขึ้นแต่ไม่มาก การดีดออกลดความสูงลง แต่โดยทั่วไปจะคงไว้
ปิด:

ภาพเดียวกัน. เศษซากยังคงอยู่ ยิ่งไปกว่านั้นประกายไฟของหน้าสัมผัสรีเลย์ยังคงอยู่ แม้ว่าจะลดลงอย่างมากก็ตาม
สรุป: มีคนดูแคลนดีกว่าไม่มีคนดูแคลน แต่ไม่ได้แก้ปัญหาทั่วโลก อย่างไรก็ตาม หากคุณต้องการสลับโหลดอุปนัยด้วยรีเลย์ปกติ ให้ติดตั้งตัวลดขนาด ต้องเลือกพิกัดสำหรับโหลดเฉพาะ แต่ตัวต้านทาน 1-W ที่ 100-120 โอห์มและตัวเก็บประจุที่ 0.1 µF ดูเหมือนจะเป็นตัวเลือกที่เหมาะสมสำหรับในกรณีนี้
เอกสารที่เกี่ยวข้อง: Agilent - เอกสารการใช้งาน 1399, “การเพิ่มอายุการใช้งานของรีเลย์ของคุณให้สูงสุด” เมื่อใช้งานรีเลย์กับโหลดประเภทที่แย่ที่สุด - มอเตอร์ซึ่งนอกเหนือจากการเหนี่ยวนำแล้วยังมีความต้านทานต่ำมากเมื่อเริ่มต้น - ผู้เขียนที่ดีแนะนำให้ลดอายุการใช้งานของรีเลย์ ห้าครั้ง.
ตอนนี้เรามาเคลื่อนไหวของอัศวินกันเถอะ - เราจะรวม triac, ไดรเวอร์ triac ที่มีการตรวจจับเป็นศูนย์และรีเลย์เป็นวงจรเดียว

อะไรอยู่ในแผนภาพนี้? ด้านซ้ายเป็นทางเข้า เมื่อใช้ "1" ตัวเก็บประจุ C2 จะถูกชาร์จเกือบจะทันทีผ่าน R1 และครึ่งล่างของ D1 Optorelay VO1 จะเปิดขึ้น รอการข้ามศูนย์ที่ใกล้ที่สุด (MOC3063 - พร้อมวงจรตัวตรวจจับศูนย์ในตัว) และเปิด Triac D4 การโหลดเริ่มต้นขึ้น
ตัวเก็บประจุ C1 ถูกชาร์จผ่านสายโซ่ R1 และ R2 ซึ่งใช้เวลาประมาณ t=RC ~ 100 ms นี่เป็นช่วงแรงดันไฟหลักหลายช่วงนั่นคือในช่วงเวลานี้ triac จะมีเวลาเปิดและรับประกัน ถัดไป Q1 จะเปิดขึ้นและรีเลย์ K1 จะเปิดขึ้น (เช่นเดียวกับ LED D2 ที่ส่องแสงสีมรกตที่น่ารื่นรมย์) หน้าสัมผัสรีเลย์จะข้าม triac ดังนั้น - จนกว่าจะปิด - จะไม่มีส่วนร่วมในการทำงาน และไม่ร้อนขึ้น
การปิดเครื่องอยู่ในลำดับย้อนกลับ ทันทีที่ "0" ปรากฏที่อินพุต C1 จะถูกปล่อยอย่างรวดเร็วผ่านต้นแขนของ D1 และ R1 รีเลย์จะปิด แต่ไทรแอกจะยังคงเปิดอยู่ประมาณ 100 มิลลิวินาที เนื่องจาก C2 ถูกปล่อยผ่าน R3 100 กิโลโอห์ม ยิ่งกว่านั้น เนื่องจากไทรแอกถูกเปิดไว้โดยกระแสไฟฟ้า แม้ว่า VO1 จะปิดแล้วก็ตาม มันจะยังคงเปิดอยู่จนกว่ากระแสโหลดจะลดลงในครึ่งรอบถัดไปที่ต่ำกว่ากระแสที่กักไว้ของไทรแอก
เปิดเครื่อง:

ปิดเครื่อง:

สวยใช่มั้ยล่ะ? ยิ่งไปกว่านั้น เมื่อใช้ triac สมัยใหม่ที่ทนทานต่อการเปลี่ยนแปลงอย่างรวดเร็วของกระแสและแรงดันไฟฟ้า (ผู้ผลิตรายใหญ่ทุกรายมีรุ่นดังกล่าว - NXP, ST, Onsemi ฯลฯ ชื่อที่ขึ้นต้นด้วย "BTA") ไม่จำเป็นต้องใช้คำดูแคลนเลย รูปแบบใดก็ได้
ยิ่งไปกว่านั้น หากคุณจำคนฉลาดจาก Agilent ได้ และดูว่ากระแสไฟที่ใช้โดยมอเตอร์เปลี่ยนแปลงไปอย่างไร คุณจะได้ภาพนี้:

กระแสเริ่มต้นเกินกระแสไฟฟ้าที่ใช้งานมากกว่าสี่เท่า ในช่วงห้าช่วงแรก - เวลาที่ triac อยู่ข้างหน้ารีเลย์ในวงจรของเรา - กระแสจะลดลงประมาณครึ่งหนึ่งซึ่งทำให้ความต้องการของรีเลย์ลดลงอย่างมากและยืดอายุการใช้งาน
ใช่ วงจรนี้ซับซ้อนกว่าและมีราคาแพงกว่ารีเลย์ทั่วไปหรือไทรแอกทั่วไป แต่บ่อยครั้งมันก็คุ้มค่า
อุปกรณ์อัตโนมัติจำนวนมากมีรีเลย์ติดตั้งไว้ แต่มาดูกันว่าสามารถควบคุมได้อย่างไรโดยใช้ตัวอย่างของวงจรง่ายๆ หลายวงจร รวมถึงวงจรหนึ่งบนไมโครคอนโทรลเลอร์
ตัวเลือกที่ 1: นี่คือไดรเวอร์รีเลย์ช่องเดียวแบบธรรมดาที่ใช้สำหรับโครงการวิทยุสมัครเล่นที่หลากหลายและอื่นๆ อีกมากมาย การออกแบบนี้สามารถใช้เพื่อเปลี่ยนผู้บริโภคที่ทรงพลัง ในขณะที่ตัวมันเองถูกควบคุมโดยแรงดันและกระแสต่ำ

ตัวเลือก 2:

การทำงาน: เมื่อใช้แรงดันไฟฟ้าจ่าย ความจุ C1 จะถูกชาร์จผ่านความต้านทาน R1 และหน้าสัมผัสปิด K1.1 เกือบถึงระดับแรงดันไฟฟ้า เมื่อคุณกด S1 ผ่านหน้าสัมผัสแบบปิดผ่าน K1.1 และ R1 แรงดันไฟฟ้าจะถูกส่งไปยังคอยล์ K1 และส่วนหลังจะถูกกระตุ้น รีเลย์ K1.1 ปิดหน้าสัมผัสด้านหน้าและจ่ายไฟให้กับขดลวดผ่านตัวต้านทาน R1 ในระหว่างการสลับหน้าสัมผัสคอยล์จะใช้พลังงานจากความจุ C1
หลังจากที่หน้าสัมผัสด้านหน้าปิด ตัวเก็บประจุ C1 จะคายประจุผ่านความต้านทาน R2 ครั้งต่อไปที่คุณกด S1 C1 จะถูกชาร์จ ส่งผลให้แรงดันไฟฟ้าบนคอยล์ลดลง และหน้าสัมผัสด้านหน้าเปิดและหน้าสัมผัสด้านหลังปิด ส่วนประกอบแบบพาสซีฟ R1 และ C1 จะสร้างวงจรที่มีค่าคงที่เวลา 150 มิลลิวินาที
ตัวเลือก 3:

วงจรควบคุมค่อนข้างง่ายและสร้างขึ้นจากรีเลย์และทรานซิสเตอร์สองขั้วหนึ่งตัว เมื่อคุณกดปุ่มเป็นครั้งแรก VT1 จะถูกปลดล็อคโดยกระแสคายประจุของตัวเก็บประจุ C1 และอุปกรณ์จะถูกกระตุ้น ตัวเก็บประจุถูกตัดการเชื่อมต่อจากแหล่งพลังงาน และหากปล่อยปุ่ม จะเริ่มคายประจุอย่างรวดเร็วผ่านไดโอดและความต้านทาน หากคุณกดปุ่มนี้เป็นครั้งที่สอง ทรานซิสเตอร์จะปิดและปิดรีเลย์ นี่คือวิธีควบคุมอุปกรณ์อัตโนมัติในเวอร์ชันนี้
หากจำเป็นต้องจัดระเบียบการควบคุมอุปกรณ์แม่เหล็กไฟฟ้าโดยใช้ไมโครคอนโทรลเลอร์ คุณสามารถประกอบการพัฒนาวิทยุสมัครเล่นต่อไปนี้ของอินเทอร์เฟซไมโครคอนโทรลเลอร์-รีเลย์ที่มีการแยกกระแสไฟฟ้า

พื้นฐานของโครงการคือชิป CNY17-1 ซึ่งเป็นออปโตคัปเปลอร์ทั่วไปที่ประกอบด้วย LED อินฟราเรดและโฟโตทรานซิสเตอร์ อุปกรณ์สามารถส่งข้อมูลในรูปแบบของสัญญาณในขณะที่ยังคงแยกระหว่างอินพุตและเอาต์พุต ปฏิสัมพันธ์ของไมโครคอนโทรลเลอร์และการใช้งานการควบคุมกับวงจรดังกล่าวนั้นถูกสร้างขึ้นค่อนข้างง่าย อินพุตสามารถเชื่อมต่อเข้ากับพิน MCU ที่เลือกผ่านทางเทอร์มินัลอินพุต อย่างไรก็ตาม จะต้องคำนึงถึงขั้วด้วย สถานะของลอจิคัลระดับ 1 (ระดับ 5 V) ที่อินพุตของออปโตคัปเปลอร์จะปิดรีเลย์และศูนย์ตรรกะจะเปิดขึ้นตามลำดับ วงจรสามารถขับเคลื่อนด้วยแหล่งจ่ายไฟ 12 V DC เกือบทุกชนิด ในอุปกรณ์ควบคุมเวอร์ชันนี้ตัวต้านทาน R1 = 1 KOhm, 12 V / รีเลย์ที่มีความต้านทานขดลวด 320 โอห์มกินไฟประมาณ 38 mA
ไดโอด D1 (1N4007, 1N4001) เชื่อมต่อแบบขนานกับขดลวดช่วยปกป้องทรานซิสเตอร์สองขั้วจากพัลส์แม่เหล็กไฟฟ้าที่เกิดจากการเหนี่ยวนำของขดลวดเมื่อปิดทรานซิสเตอร์ ความจุ C1 100 µF เป็นตัวเก็บประจุแบบแบ่ง ซึ่งได้รับการออกแบบมาเพื่อรองรับกระแสกระเพื่อมเมื่อรีเลย์เปิดและปิด
การเลือกวงจรง่ายๆ ที่ควบคุมโหลดที่ทรงพลังในช่วงเวลาหนึ่ง แล้วปิดโดยอัตโนมัติ
กุนเธอร์ เกราท์ ประเทศเยอรมนี
ลอจิก "1", ลอจิก "0" และอิมพีแดนซ์สูง สถานะเอาท์พุตสามสถานะสอดคล้องกับสถานะเครื่องยนต์สามสถานะ: “เดินหน้า” “ถอยหลัง” และ “หยุด”
ในการควบคุมโหลดอิสระสองตัว เช่น รีเลย์ โดยปกติจำเป็นต้องใช้พอร์ต I/O ของไมโครคอนโทรลเลอร์จำนวน 2 พอร์ต ในกรณีนี้ คุณมีโอกาสที่จะเปิดรีเลย์สองตัว เปิดตัวหนึ่งแล้วปิดอีกตัวหนึ่ง หรือปิดทั้งสองตัว หากคุณไม่จำเป็นต้องเปิดรีเลย์สองตัวพร้อมกัน คุณสามารถควบคุมสถานะที่เหลืออีกสามสถานะได้โดยใช้พินเดียวของไมโครคอนโทรลเลอร์ สิ่งนี้ใช้สถานะเอาต์พุตอิมพีแดนซ์สูง
วงจรนี้สามารถนำไปใช้ได้ เช่น ในการควบคุมมอเตอร์ไฟฟ้า ทิศทางการหมุนของมอเตอร์ขึ้นอยู่กับว่าเลือกเฟสใดในสองเฟส สำหรับการสลับเฟส คุณสามารถใช้รีเลย์ MOS ทั้งระบบเครื่องกลไฟฟ้าแบบคลาสสิกและโซลิดสเตตได้ ในตัวเลือกใดๆ เมื่อรีเลย์ทั้งสองเปิด เครื่องยนต์จะหยุดทำงาน
ในการควบคุมรีเลย์ระบบเครื่องกลไฟฟ้า จะใช้วงจรที่แสดงในรูปที่ 1 ด้วยตรรกะ "1" ที่เอาต์พุตของไมโครคอนโทรลเลอร์ ทรานซิสเตอร์ Q 1 จะเปิดรีเลย์ REL 1 ซึ่งช่วยให้มอเตอร์หมุนไปในทิศทางไปข้างหน้า เมื่อเอาต์พุตเปลี่ยนเป็น "0" ทรานซิสเตอร์ Q 3 จะถูกปิด ซึ่งจะทำให้หน้าสัมผัส REL 2 ปิดและมอเตอร์เริ่มหมุนไปในทิศทางตรงกันข้าม หากพอร์ตไมโครคอนโทรลเลอร์อยู่ในสถานะอิมพีแดนซ์สูง ทรานซิสเตอร์ Q 1, Q 2 และ Q 3 จะปิดเนื่องจากแรงดันไฟฟ้า 1 V ที่ฐานของ Q 2 น้อยกว่าผลรวมของแรงดันไฟฟ้าเกณฑ์ของทางแยกฐาน-อิมิตเตอร์ Q 1 และ Q 2 และแรงดันตกคร่อมไดโอด D 1 รีเลย์ทั้งสองปิดและมอเตอร์หยุด สามารถรับแรงดันไฟฟ้า 1 V ได้โดยใช้ตัวแบ่งแรงดันไฟฟ้าหรือตัวติดตามตัวปล่อย ไดโอด D 2 และ D 3 ทำหน้าที่ปกป้องตัวสะสม Q 1 และ Q 2 จากแรงดันไฟกระชากที่เกิดขึ้นเมื่อรีเลย์ปิดอยู่ ทรานซิสเตอร์ NPN และ PNP พลังงานต่ำเกือบทั้งหมดสามารถใช้ในวงจรได้ การเลือก D 1 ก็ไม่สำคัญเช่นกัน
วงจรควบคุมรีเลย์ MOS นั้นง่ายกว่าเนื่องจากสามารถเชื่อมต่อ LED เข้ากับเอาต์พุตของไมโครคอนโทรลเลอร์เกือบทุกชนิดได้โดยตรง (รูปที่ 2) ลอจิคัล "1" จะเปิดรีเลย์ LED S 1 และลอจิคัล "0" จะเปิด S 2 โดยเปิดไทรแอกเอาต์พุตที่สอดคล้องกัน เมื่อพอร์ตเข้าสู่สถานะอิมพีแดนซ์สูง ไฟ LED ทั้งสองดวงจะดับลงเนื่องจากแรงดันไฟฟ้า 1.2V DC น้อยกว่าผลรวมของแรงดันไฟฟ้าเกณฑ์ของ LED ทั้งสองดวง วาริสเตอร์ R 3, R 5 และวงจรหน่วง C 1, R 4, C 2, R 6 ทำหน้าที่ปกป้องรีเลย์ MOS พารามิเตอร์ขององค์ประกอบเหล่านี้จะถูกเลือกตามโหลด
บทความนี้จะอธิบายว่าไมโครคอนโทรลเลอร์สามารถควบคุมโหลดภายนอกโดยใช้รีเลย์แม่เหล็กไฟฟ้าได้อย่างไร
เมื่อออกแบบอุปกรณ์บนไมโครคอนโทรลเลอร์ มักจำเป็นต้องควบคุมอุปกรณ์ภายนอกต่างๆ โดยการเปิดและปิดแรงดันไฟฟ้า นอกจากนี้ แรงดันไฟฟ้าและการใช้กระแสไฟของอุปกรณ์ดังกล่าวอาจแตกต่างกันภายในขีดจำกัดที่กว้าง วิธีสากลในการควบคุมอุปกรณ์ดังกล่าวคือรีเลย์แม่เหล็กไฟฟ้า ปัจจุบันรีเลย์ขนาดเล็กที่มีพารามิเตอร์ค่อนข้างดีมีจำหน่ายแล้ว ปัจจุบัน รีเลย์สามารถสลับโหลดในวงจรได้สูงสุด 220 โวลต์ ที่กระแสสูงถึง 10 แอมแปร์และสูงกว่า คอยล์รีเลย์มักจะได้รับการจัดอันดับที่ 12V และกินไฟเพียง 40mA สิ่งนี้ทำให้คุณสามารถใช้สวิตช์ทรานซิสเตอร์กำลังต่ำเพื่อควบคุมได้ ตัวอย่างเช่นใน KT315 ที่ใช้กันอย่างแพร่หลาย คุณสามารถนำ BC547 ที่นำเข้ามาได้ แผนภาพการเชื่อมต่อของรีเลย์ไปยังไมโครคอนโทรลเลอร์แสดงในรูปต่อไปนี้:
แผนภาพการเชื่อมต่อรีเลย์
เพื่อเปิดโหลด ไมโครคอนโทรลเลอร์จะตั้งค่าสัญญาณลอจิคัลที่เอาต์พุต (ในกรณีนี้คือที่เอาต์พุต PB4) แรงดันไฟฟ้าผ่านตัวต้านทาน R1 ถูกส่งไปยังฐานของทรานซิสเตอร์ แทนซิสเตอร์จะเปิดขึ้นและรีเลย์ทำงาน หน้าสัมผัสจะปิดวงจรโหลด หากต้องการตัดการเชื่อมต่อโหลด ไมโครคอนโทรลเลอร์จะตั้งค่าสัญญาณโลจิคัลเป็นศูนย์ที่เอาต์พุต ที่ฐานของ VT1 แรงดันไฟฟ้าจะลดลงเหลือศูนย์ ทรานซิสเตอร์ปิดและรีเลย์ปิด ไดโอด VD1 ทำหน้าที่ปกป้องวงจรจากแรงดันไฟฟ้าเหนี่ยวนำตัวเองซึ่งเกิดขึ้นในขดลวดรีเลย์เมื่อแรงดันไฟฟ้าถูกถอดออก จำเป็นต้องใช้ตัวต้านทาน R2 เพื่อปิดทรานซิสเตอร์ VT1 ได้อย่างน่าเชื่อถือมากขึ้น
แม้ว่าไมโครคอนโทรลเลอร์จะจ่ายไฟจากแหล่งจ่ายไฟ +5V ที่เสถียร สวิตช์และรีเลย์จะจ่ายไฟจากแรงดันไฟฟ้า +12V ที่ไม่เสถียร แรงดันไฟฟ้านี้จะถูกลบออกจากวงจรเรียงกระแสเดียวกัน แต่ก่อนตัวปรับความเสถียร สำหรับรายละเอียดเพิ่มเติม โปรดดูบทความ "แผนภาพแหล่งจ่ายไฟ"
บทความนี้กล่าวถึงวงจรจ่ายไฟที่ได้รับการควบคุมซึ่งสามารถใช้ในการจ่ายไฟให้กับอุปกรณ์ไมโครโปรเซสเซอร์แบบธรรมดา
ดังที่คุณทราบในการจ่ายไฟให้กับไมโครวงจรดิจิตอลคุณต้องมีแรงดันไฟฟ้าที่เสถียรที่ 5V โปรดทราบว่าไมโครคอนโทรลเลอร์รุ่นใหม่สามารถทำงานได้บนแรงดันไฟฟ้าที่หลากหลาย โดยทั่วไป 3 ถึง 6 โวลต์ ข้อกำหนดหลักคือแรงดันไฟฟ้าต้องมีความเสถียร นั่นคือมันไม่เปลี่ยนแปลงเมื่อโหลดเปลี่ยนไป อย่างไรก็ตาม โดยปกติแล้ว อุปกรณ์ไมโครโปรเซสเซอร์ใดๆ นอกเหนือจากไมโครคอนโทรลเลอร์เองแล้ว ยังมีวงจรไมโครอื่นๆ อีกจำนวนหนึ่ง ซึ่งโดยปกติแล้วจะมีความต้องการแรงดันไฟฟ้าที่จ่ายมากกว่า ดังนั้นจึงถูกต้องที่สุดในการเลือกแรงดันไฟฟ้าที่ +5V เว้นแต่จะมีเหตุผลพิเศษใดๆ แรงดันไฟฟ้านี้ใช้กันอย่างแพร่หลายในเทคโนโลยีอิเล็กทรอนิกส์ ดังนั้นอุตสาหกรรมจึงได้สร้างการผลิตไมโครวงจรพิเศษ - ตัวปรับแรงดันไฟฟ้ามาเป็นเวลานาน สำหรับการใช้งานส่วนใหญ่ชิป 7905 หรือ KREN5 แบบอะนาล็อกในประเทศนั้นเหมาะสม รูปด้านล่างแสดงไดอะแกรมของแหล่งจ่ายไฟที่ออกแบบมาเพื่อจ่ายไฟให้กับอุปกรณ์ที่ใช้ไมโครคอนโทรลเลอร์เกือบทุกชนิด

แผนภาพแหล่งจ่ายไฟ
หม้อแปลงไฟฟ้า T1 จะลดแรงดันไฟหลักลงเป็นค่าที่ต้องการ (ประมาณ 8...9 โวลต์) วงจรเรียงกระแส VD1 ช่วยยืดให้ตรง ตัวกรองล่วงหน้า C1 จะทำให้ระลอกคลื่นของแรงดันไฟฟ้าที่แก้ไขเรียบขึ้น และด้วยเหตุนี้ อินพุตของโคลง DA1 จึงจ่ายแรงดันไฟฟ้าคงที่ที่ไม่เสถียรประมาณ 12 V ไปยังเอาต์พุต (เพื่อจ่ายไฟให้กับวงจรดิจิทัลของอุปกรณ์ไมโครคอนโทรลเลอร์ นอกจากนี้ยังมีการจ่ายแรงดันไฟฟ้าที่ไม่เสถียรที่ +12V เพื่อจ่ายไฟให้กับวงจรบางส่วนของอุปกรณ์ไมโครคอนโทรลเลอร์ โดยปกติแล้ววงจรเหล่านี้คือวงจรกำลังที่ไม่ต้องการการรักษาเสถียรภาพแรงดันไฟฟ้า: LED, รีเลย์ ฯลฯ การเชื่อมต่อวงจรดังกล่าวก่อนโคลงช่วยลดการทำงานของวงจร DA1 ได้อย่างมาก ช่วยเพิ่มความน่าเชื่อถือและเพิ่มประสิทธิภาพ การรบกวนความถี่สูง
นอกจากวงจรไฟฟ้าแล้ว วงจรด้านบนยังมีวงจรพิเศษที่ช่วยให้รับสัญญาณซิงโครนัสกับความถี่ของแรงดันไฟหลักได้ สัญญาณดังกล่าวสามารถจ่ายให้กับตัวเปรียบเทียบซึ่งเป็นส่วนหนึ่งของไมโครคอนโทรลเลอร์หลายตัวและช่วยให้คุณใช้อัลกอริธึมการควบคุมสำหรับไทริสเตอร์หรือสวิตช์ออปโตไดนิสเตอร์เพื่อการปรับกำลังของโหลดได้อย่างราบรื่น ในอัลกอริธึมดังกล่าว โปรเซสเซอร์จะนับความล่าช้าที่ต้องการจากจุดเริ่มต้นของครึ่งรอบปัจจุบันของแรงดันไฟหลัก และหลังจากการหน่วงเวลานี้ ไทริสเตอร์จะเปิดขึ้น เมื่อสิ้นสุดครึ่งรอบ เมื่อแรงดันไฟฟ้าชั่วขณะผ่านศูนย์ ไทริสเตอร์จะปิด และไมโครคอนโทรลเลอร์จะนับการหน่วงเวลาถัดไป ด้วยการเปลี่ยนเวลาหน่วง คุณสามารถเปลี่ยนระยะเวลาของพัลส์ที่จ่ายให้กับโหลดได้ และด้วยเหตุนี้จึงเปลี่ยนกำลังที่จ่ายให้กับโหลดนี้
บทความนี้จะอธิบายวิธีเชื่อมต่อไฟ LED ตัวเดียวกับไมโครคอนโทรลเลอร์
ไม่มีอุปกรณ์ที่ใช้ไมโครคอนโทรลเลอร์จะสมบูรณ์หากไม่มีไฟแสดงสถานะ สะดวกที่สุดในการใช้ LED เป็นตัวปล่อยแสงเดี่ยว ไมโครคอนโทรลเลอร์สมัยใหม่ (โดยเฉพาะไมโครคอนโทรลเลอร์ซีรีส์ AVR) มีวงจรเอาท์พุตที่ทรงพลังพอสมควร ได้รับการออกแบบมาสำหรับกระแสเอาต์พุตสูงถึง 40 mA นี่ค่อนข้างเพียงพอที่จะเชื่อมต่อ LED พลังงานต่ำหนึ่งตัวโดยตรง รูปภาพต่อไปนี้แสดงวิธีเชื่อมต่อ LED เข้ากับเอาต์พุตของไมโครคอนโทรลเลอร์

การเชื่อมต่อ LED โดยตรง
ไฟ LED แสดงสถานะพลังงานต่ำแบบธรรมดาเป็นวิธีบ่งชี้ที่พบบ่อยที่สุด สิ่งเหล่านี้คือตัวบ่งชี้ที่เราเห็นในโครงสร้างส่วนใหญ่ อย่างไรก็ตาม บางครั้งจำเป็นต้องเชื่อมต่อ LED ที่ทรงพลังกว่าเข้ากับไมโครคอนโทรลเลอร์ เหล่านี้คือไฟ LED ความสว่างสูงหรือไฟ LED พื้นที่ขนาดใหญ่ ในกรณีที่การใช้กระแสไฟ LED เกิน 40 mA จะใช้สวิตช์อิเล็กทรอนิกส์บนทรานซิสเตอร์ ด้านล่างนี้เป็นแผนภาพของการเชื่อมต่อดังกล่าว

การเชื่อมต่อโดยใช้กุญแจอิเล็กทรอนิกส์
เมื่อใช้ทรานซิสเตอร์ KT315 คุณสามารถเชื่อมต่อ LED ที่มีการสิ้นเปลืองกระแสไฟสูงถึง 100 mA หากคุณต้องการเชื่อมต่อ LED ที่มีการสิ้นเปลืองกระแสไฟที่สูงขึ้น คุณจะต้องเลือกทรานซิสเตอร์ตัวอื่นที่ทรงพลังกว่า
บทความนี้ครอบคลุมถึงปัญหาการเชื่อมต่อปุ่มและปุ่มต่างๆ เข้ากับไมโครคอนโทรลเลอร์

แทบไม่มีระบบไมโครโปรเซสเซอร์ใดที่สามารถทำได้หากไม่มีปุ่ม กุญแจ หน้าสัมผัสปลายทาง และองค์ประกอบการสลับที่คล้ายกัน อุปกรณ์สวิตชิ่งที่คล้ายกันนั้นเป็นเพียงหน้าสัมผัสคู่หนึ่งที่จะปิดเมื่อกดปุ่ม (ปุ่ม) หรือมีการกระทำทางกลอื่น ๆ เกิดขึ้น ตัวอย่างเช่น เมื่อลิมิตสวิตช์ของกลไกควบคุมถูกกระตุ้น ดังนั้นการเชื่อมต่ออุปกรณ์ใด ๆ ข้างต้นจึงเป็นการเชื่อมต่อคู่หน้าสัมผัสเข้ากับไมโครคอนโทรลเลอร์ ไมโครคอนโทรลเลอร์ซีรีส์ AVR ค่อนข้างเหมาะสำหรับการทำงานกับปุ่มต่างๆ แต่ละพินของแต่ละพอร์ตมีวิธีพิเศษเพื่ออำนวยความสะดวกในการเชื่อมต่อหน้าสัมผัสภายนอก
รูปที่ 1 แสดงวิธีทั่วไปในการเชื่อมต่อพินเข้ากับพอร์ตไมโครคอนโทรลเลอร์ มาดูหลักการทำงานของวงจรนี้กันดีกว่า แต่ก่อนอื่น เราต้องจำไว้ว่าพินใดๆ ของพอร์ตใดๆ สามารถทำงานได้ในหนึ่งในสองโหมด: ไม่ว่าจะเป็นอินพุตหรือเอาต์พุต ในกรณีของเรา จะต้องเปลี่ยนพินที่เกี่ยวข้องเป็นโหมดอินพุต ในโหมดนี้ คุณสามารถเชื่อมต่อตัวต้านทานโหลดภายในกับสายภายนอกใดๆ โดยทางโปรแกรมได้ หากจำเป็น ในรูปที่ 1 ตัวต้านทานนี้ถูกกำหนดให้เป็น R ตัวต้านทานนี้ถูกนำมาใช้เป็นพิเศษเพื่อทำงานกับหน้าสัมผัสภายนอก เมื่อสร้างโปรแกรมสำหรับอินพุตทั้งหมดที่มีพินเชื่อมต่ออยู่ ต้องแน่ใจว่าได้จัดเตรียมคำสั่งที่เปิดตัวต้านทานนี้ หากอินพุตมีจุดประสงค์เพื่อจุดประสงค์อื่น จำเป็นต้องถอดตัวต้านทานออก กุญแจอิเล็กทรอนิกส์ที่เปิดและปิดตัวต้านทานโหลดภายในโดยทางโปรแกรมจะแสดงในรูปที่ 1 และกำหนดให้เป็น K
ดังนั้นเอาต์พุตพอร์ตจึงถูกตั้งโปรแกรมเป็นอินพุตตัวต้านทานโหลดภายในจึงเปิดอยู่ หากหน้าสัมผัสภายนอก K1 เปิดอยู่แสดงว่ามีแรงดันไฟฟ้าที่อินพุตใกล้กับแรงดันไฟฟ้าซึ่งจ่ายผ่านตัวต้านทาน R เมื่ออ่านข้อมูลจากพอร์ตบิตนี้จะเป็นตรรกะ หากปิดหน้าสัมผัส สายพอร์ตจะลัดวงจรไปที่สายทั่วไป แรงดันไฟฟ้าขาเข้าจะกลายเป็นศูนย์ เมื่ออ่านข้อมูล เลขศูนย์จะปรากฏในพอร์ตบิตนี้ ดังนั้นโดยการอ่านข้อมูลจากพอร์ตและวิเคราะห์ค่าของบิตที่เกี่ยวข้อง ไมโครคอนโทรลเลอร์จึงสามารถระบุได้เสมอว่าหน้าสัมผัสถูกปิดหรือไม่ หากการคายประจุเป็นศูนย์ หน้าสัมผัสจะถูกปิด หากเป็นเช่นนั้น หน้าสัมผัสจะเปิดขึ้น
ในลักษณะข้างต้น คุณสามารถเชื่อมต่อคู่หน้าสัมผัสแยกกันเข้ากับพินทั้งหมดของพอร์ตทั้งหมดได้หากต้องการ อย่างไรก็ตาม วิธีการนี้ไม่สามารถเรียกว่ามีเหตุผลได้ นอกจากคีย์แล้ว อุปกรณ์อื่นๆ จะต้องเชื่อมต่อกับพอร์ตไมโครคอนโทรลเลอร์ เช่น ไฟแสดง รีเลย์ เซ็นเซอร์ ช่องการสื่อสารแบบอนุกรม และอื่นๆ อีกมากมาย ดังนั้น เพื่อประหยัดพินและลดความซับซ้อนของวงจร จึงใช้เมทริกซ์หลัก แผนภาพของเมทริกซ์ 16 คีย์ทั่วไปจะแสดงในรูปที่ 2

ในการเชื่อมต่อเมทริกซ์ จะใช้พอร์ต PB ทั้งหมดของไมโครคอนโทรลเลอร์และพอร์ต PD อีกสองบรรทัด ดังที่เห็นได้จากแผนภาพ แต่ละพินของพอร์ต PB เชื่อมต่อกับปุ่มสองปุ่มพร้อมกัน เช่น ขา PB0 เชื่อมต่อกับปุ่ม S1 และ S9 ปักหมุด PB1 ไปที่ S2 และ S10 และอื่นๆ หน้าสัมผัสที่สองของแต่ละปุ่มเชื่อมต่อกับหนึ่งในบรรทัด PD5 หรือ PD6 เป็นผลให้เกิดเมทริกซ์ขึ้น มันมีลักษณะคล้ายขัดแตะ เส้นแนวตั้งสองเส้นและแนวนอนแปดเส้น มีการแทรกปุ่มไว้ที่แต่ละจุดตัดของสายไฟเหล่านี้
เมทริกซ์นี้ทำงานอย่างไร? เพื่อการทำงานที่เหมาะสม พินทั้งหมดของพอร์ต PB จะต้องสลับไปที่โหมดอินพุต และต้องเปิดตัวต้านทานโหลดภายในสำหรับอินพุตแต่ละตัว และต้องสลับพินสองตัวของพอร์ต PD (PD5 และ PD6) ไปที่โหมดเอาต์พุต ในการอ่านสถานะของปุ่มต่างๆ ไมโครคอนโทรลเลอร์จะต้องจ่ายสัญญาณโลจิคัลศูนย์ให้กับเอาต์พุต PD6 และส่งสัญญาณโลจิคัลหนึ่งไปยังเอาต์พุต PD5 ก่อน จากนั้นควรอ่านไบต์จากพอร์ต PB ไบต์นี้จะมีข้อมูลเกี่ยวกับสถานะของปุ่ม S1...S8 แต่ละบิตจะต้องรับผิดชอบปุ่มของตัวเอง บิตศูนย์ (PB0) สำหรับปุ่ม S1, บิตหนึ่ง (PB1) สำหรับปุ่ม S2 ฯลฯ หากกดปุ่มตัวเลขที่เกี่ยวข้องจะเป็นศูนย์หากไม่ได้กด - หนึ่ง หลังจากวิเคราะห์การกดปุ่มครึ่งแรกแล้ว ไมโครคอนโทรลเลอร์จะต้องตั้งค่าเอาต์พุต PD5 ให้เป็นศูนย์ลอจิคัล และเอาต์พุต PD6 เป็นค่าหนึ่ง และอ่านไบต์จากพอร์ต PB อีกครั้ง ตอนนี้ไบต์นี้จะมีข้อมูลเกี่ยวกับสถานะของปุ่ม S9...S16 โดยการสำรวจปุ่มครึ่งแรกหรือครึ่งหลังในลักษณะนี้ ไมโครคอนโทรลเลอร์สามารถตอบสนองต่อการกดปุ่มแต่ละปุ่มแยกกัน
เมทริกซ์ที่อธิบายไว้ข้างต้นสามารถขยายได้อย่างง่ายดาย คุณไม่สามารถใช้เส้นแนวตั้งสองเส้น แต่สามสี่สี่และอื่น ๆ สำหรับไมโครคอนโทรลเลอร์นี้ เมทริกซ์สูงสุดที่เป็นไปได้จะมีขนาด 7X8 เนื่องจากพอร์ต PD มีเพียงเจ็ดบรรทัด จำนวนปุ่มทั้งหมดจะเป็น 56 ปุ่ม
บทความต่อไปนี้จะรวมอุปกรณ์ที่ต้องควบคุมโหลดภายนอก สำหรับโหลดภายนอก ฉันหมายถึงทุกสิ่งที่ติดอยู่กับขาของไมโครคอนโทรลเลอร์ - ไฟ LED, หลอดไฟ, รีเลย์, มอเตอร์, แอคทูเอเตอร์... คุณเข้าใจแล้ว และไม่ว่าหัวข้อนี้จะแฮ็กแค่ไหนเพื่อหลีกเลี่ยงการซ้ำซ้อนในบทความต่อไปนี้ฉันยังคงเสี่ยงที่จะไม่เป็นต้นฉบับ - คุณจะยกโทษให้ฉัน :) ฉันจะแสดงวิธีเชื่อมต่อโหลดที่พบบ่อยที่สุดในรูปแบบการแนะนำสั้น ๆ (ถ้าคุณต้องการเพิ่มอะไรฉันจะดีใจเกินไปเท่านั้น)
ยอมรับทันทีว่าเรากำลังพูดถึงสัญญาณดิจิทัล (ไมโครคอนโทรลเลอร์ยังคงเป็นอุปกรณ์ดิจิทัล) และเราจะไม่เบี่ยงเบนไปจากตรรกะทั่วไป: 1
- รวมอยู่ด้วย, 0
-ปิด. มาเริ่มกันเลย
โหลดไฟฟ้ากระแสตรงประกอบด้วย: ไฟ LED, หลอดไฟ, รีเลย์, มอเตอร์กระแสตรง, เซอร์โว, แอคทูเอเตอร์ต่างๆ ฯลฯ โหลดดังกล่าวเชื่อมต่อกับไมโครคอนโทรลเลอร์ได้ง่ายที่สุด (และบ่อยที่สุด)
1.1 การเชื่อมต่อ โหลดผ่านตัวต้านทาน
วิธีที่ง่ายที่สุดและอาจใช้บ่อยที่สุดเมื่อพูดถึง LED

จำเป็นต้องมีตัวต้านทานเพื่อจำกัดกระแสที่ไหลผ่านขาไมโครคอนโทรลเลอร์ให้อยู่ในระดับที่อนุญาต 20mA- เรียกว่าบัลลาสต์หรือแดมปิ้ง คุณสามารถคำนวณค่าตัวต้านทานโดยประมาณได้โดยทราบค่าความต้านทานโหลด Rн
การดับ =(5v / 0.02A) – Rн = 250 – รน
อย่างที่คุณเห็นแม้ในกรณีที่เลวร้ายที่สุดเมื่อความต้านทานโหลดเป็นศูนย์ 250 โอห์มก็เพียงพอแล้วเพื่อให้แน่ใจว่ากระแสจะไม่เกิน 20 mA ซึ่งหมายความว่าหากคุณไม่ต้องการนับบางสิ่งที่นั่น ให้ใส่ 300 โอห์มและคุณจะปกป้องพอร์ตจากการโอเวอร์โหลด ข้อดีของวิธีนี้ชัดเจน - ความเรียบง่าย
1.2 การเชื่อมต่อ โหลดโดยใช้ทรานซิสเตอร์แบบไบโพลาร์
หากเป็นเช่นนั้นโหลดของคุณกินไฟมากกว่า 20mA แน่นอนว่าตัวต้านทานจะไม่ช่วยที่นี่ คุณต้องเพิ่ม (เพิ่มความแข็งแกร่งในการอ่าน) ในปัจจุบัน ใช้อะไรขยายสัญญาณครับ? ขวา. ทรานซิสเตอร์!
![]()
ใช้เสริมกำลังได้สะดวกกว่า n-p-nทรานซิสเตอร์ต่อตามวงจร OE- ด้วยวิธีนี้ คุณสามารถเชื่อมต่อโหลดที่มีแรงดันไฟฟ้าสูงกว่าแหล่งจ่ายไฟเข้ากับไมโครคอนโทรลเลอร์ได้ ตัวต้านทานบนฐานมีขีดจำกัด มันสามารถเปลี่ยนแปลงได้ในช่วงกว้าง (1-10 kOhm) ไม่ว่าในกรณีใดทรานซิสเตอร์จะทำงานในโหมดความอิ่มตัว ทรานซิสเตอร์สามารถเป็นอะไรก็ได้ n-p-nทรานซิสเตอร์. กำไรนั้นแทบไม่เกี่ยวข้องเลย ทรานซิสเตอร์ถูกเลือกตามกระแสของตัวสะสม (กระแสที่เราต้องการ) และแรงดันไฟฟ้าของตัวสะสม-อิมิตเตอร์ (แรงดันไฟฟ้าที่ให้พลังงานแก่โหลด) การกระจายพลังงานก็มีความสำคัญเช่นกัน - เพื่อไม่ให้ร้อนเกินไป
ในบรรดาตัวอักษรทั่วไปและเข้าถึงได้ง่ายคุณสามารถใช้ BC546, BC547, BC548, BC549 กับตัวอักษรใดก็ได้ (100mA) และ KT315 เดียวกันจะทำ (ผู้ที่มีของเหลือจากหุ้นเก่า)
- เอกสารข้อมูลสำหรับทรานซิสเตอร์แบบไบโพลาร์ BC547
1.3 การเชื่อมต่อ โหลดโดยใช้ทรานซิสเตอร์สนามผล
จะเกิดอะไรขึ้นถ้ากระแสโหลดของเราอยู่ภายในสิบแอมแปร์? ไม่สามารถใช้ทรานซิสเตอร์แบบไบโพลาร์ได้เนื่องจากกระแสควบคุมของทรานซิสเตอร์ดังกล่าวมีขนาดใหญ่และน่าจะเกิน 20 mA เอาท์พุตอาจเป็นได้ทั้งทรานซิสเตอร์แบบคอมโพสิต (อ่านด้านล่าง) หรือทรานซิสเตอร์แบบฟิลด์เอฟเฟกต์ (หรือที่รู้จักในชื่อ MOS หรือที่รู้จักในชื่อ MOSFET) ทรานซิสเตอร์สนามแม่เหล็กเป็นเพียงสิ่งมหัศจรรย์ เนื่องจากมันไม่ได้ถูกควบคุมโดยกระแส แต่โดยศักย์ไฟฟ้าที่เกต ทำให้กระแสประตูด้วยกล้องจุลทรรศน์สามารถควบคุมกระแสโหลดขนาดใหญ่ได้
ทรานซิสเตอร์เอฟเฟกต์สนามแบบ n-channel ใด ๆ ที่เหมาะกับเรา เราเลือกตามกระแสแรงดันและการกระจายพลังงานเช่นเดียวกับไบโพลาร์

เมื่อเปิดทรานซิสเตอร์เอฟเฟกต์สนาม คุณต้องพิจารณาหลายประเด็น:
- เนื่องจากอันที่จริงแล้วเกทนั้นเป็นตัวเก็บประจุ เมื่อทรานซิสเตอร์เปลี่ยน กระแสขนาดใหญ่จะไหลผ่านมัน (ระยะสั้น) เพื่อจำกัดกระแสเหล่านี้ ให้วางตัวต้านทานจำกัดไว้ที่เกต
— ทรานซิสเตอร์ถูกควบคุมโดยกระแสต่ำ และหากเอาท์พุตของไมโครคอนโทรลเลอร์ที่เกตเชื่อมต่ออยู่ในสถานะ Z อิมพีแดนซ์สูง สวิตช์ฟิลด์จะเริ่มเปิดและปิดอย่างไม่อาจคาดเดาได้ และจับสัญญาณรบกวนได้ เพื่อกำจัดพฤติกรรมนี้ ต้อง "กด" ขาไมโครคอนโทรลเลอร์กับพื้นด้วยตัวต้านทานประมาณ 10 kOhm
ทรานซิสเตอร์สนามแม่เหล็กที่มีพื้นหลังของคุณสมบัติเชิงบวกทั้งหมดมีข้อเสียเปรียบ ค่าใช้จ่ายในการควบคุมกระแสไฟฟ้าต่ำคือความช้าของทรานซิสเตอร์ แน่นอนว่ามันจะรองรับ PWM แต่หากเกินความถี่ที่อนุญาต มันจะตอบสนองต่อคุณด้วยความร้อนสูงเกินไป
1.4 การเชื่อมต่อ โหลดโดยใช้ทรานซิสเตอร์ดาร์ลิงตันแบบผสม
อีกทางเลือกหนึ่งนอกเหนือจากการใช้ทรานซิสเตอร์เอฟเฟกต์สนามสำหรับโหลดกระแสสูงคือการใช้ทรานซิสเตอร์ดาร์ลิงตันแบบคอมโพสิต ภายนอกเป็นทรานซิสเตอร์ตัวเดียวกับแบบไบโพลาร์ แต่ภายในวงจรปรีแอมพลิฟายเออร์ใช้เพื่อควบคุมทรานซิสเตอร์เอาท์พุตอันทรงพลัง สิ่งนี้ทำให้กระแสต่ำสามารถขับเคลื่อนโหลดที่ทรงพลังได้ การใช้ทรานซิสเตอร์ดาร์ลิงตันนั้นไม่น่าสนใจเท่ากับการใช้ชุดประกอบของทรานซิสเตอร์ดังกล่าว มีวงจรขนาดเล็กที่ยอดเยี่ยมเช่น ULN2003 ประกอบด้วยทรานซิสเตอร์ดาร์ลิงตันมากถึง 7 ตัว ซึ่งแต่ละตัวสามารถโหลดด้วยกระแสสูงถึง 500 mA และสามารถเชื่อมต่อแบบขนานเพื่อเพิ่มกระแสได้

ไมโครเซอร์กิตเชื่อมต่อกับไมโครคอนโทรลเลอร์ได้ง่ายมาก (เพียงต่อพิน) มีสายไฟที่สะดวก (อินพุตตรงข้ามเอาต์พุต) และไม่จำเป็นต้องเดินสายเพิ่มเติม จากการออกแบบที่ประสบความสำเร็จนี้ ULN2003 จึงถูกนำมาใช้กันอย่างแพร่หลายในการฝึกปฏิบัติวิทยุสมัครเล่น ดังนั้นการรับมันจึงไม่ใช่เรื่องยาก
- เอกสารข้อมูลสำหรับชุดประกอบ Darlington ULN2003
หากคุณต้องการควบคุมอุปกรณ์ AC (ส่วนใหญ่มักจะเป็น 220v) ทุกอย่างจะซับซ้อนกว่า แต่ก็ไม่มาก
2.1 การเชื่อมต่อ โหลดโดยใช้รีเลย์
การเชื่อมต่อที่ง่ายที่สุดและน่าเชื่อถือที่สุดคือการใช้รีเลย์ คอยล์รีเลย์นั้นเป็นโหลดกระแสสูง ดังนั้นคุณจึงไม่สามารถเชื่อมต่อเข้ากับไมโครคอนโทรลเลอร์ได้โดยตรง สามารถเชื่อมต่อรีเลย์ผ่านทรานซิสเตอร์แบบฟิลด์เอฟเฟกต์หรือไบโพลาร์ หรือผ่าน ULN2003 เดียวกันได้ หากต้องการหลายช่องสัญญาณ

ข้อดีของวิธีนี้คือกระแสไฟสวิตชิ่งสูง (ขึ้นอยู่กับรีเลย์ที่เลือก) การแยกกัลวานิก ข้อเสีย: ความเร็ว/ความถี่ในการเปิดใช้งานที่จำกัด และการสึกหรอทางกลของชิ้นส่วน
มันไม่สมเหตุสมผลเลยที่จะแนะนำบางอย่างให้ใช้งาน - มีรีเลย์มากมายให้เลือกตามพารามิเตอร์และราคาที่ต้องการ
2.2 การเชื่อมต่อ โหลดใช้ไตรแอค (triac)
หากคุณต้องการควบคุมโหลด AC ที่ทรงพลัง และโดยเฉพาะอย่างยิ่งถ้าคุณต้องการควบคุมพลังงานที่จ่ายให้กับโหลด (ไดเมอร์) คุณก็ทำไม่ได้โดยไม่ต้องใช้ triac (หรือ triac) ไทรแอกถูกเปิดโดยพัลส์กระแสสั้นผ่านอิเล็กโทรดควบคุม (สำหรับครึ่งคลื่นแรงดันลบและบวก) ไทรแอกจะปิดตัวเองเมื่อไม่มีแรงดันไฟฟ้า (เมื่อแรงดันไฟฟ้าผ่านศูนย์) นี่คือจุดเริ่มต้นของความยากลำบาก ไมโครคอนโทรลเลอร์จะต้องควบคุมช่วงเวลาที่แรงดันไฟฟ้าข้ามศูนย์และส่งพัลส์เพื่อเปิดไตรแอคในช่วงเวลาที่กำหนดไว้อย่างแม่นยำ - นี่คือการใช้งานคงที่ของคอนโทรลเลอร์ ปัญหาอีกประการหนึ่งคือการขาดการแยกกัลวานิกในไตรแอค คุณต้องทำในองค์ประกอบที่แยกจากกัน ซึ่งจะทำให้วงจรซับซ้อนขึ้น

แม้ว่าไทรแอกสมัยใหม่จะถูกควบคุมด้วยกระแสไฟฟ้าที่ค่อนข้างต่ำและสามารถเชื่อมต่อได้โดยตรง (ผ่านตัวต้านทานจำกัด) เข้ากับไมโครคอนโทรลเลอร์ แต่ด้วยเหตุผลด้านความปลอดภัย จะต้องเปิดอุปกรณ์เหล่านี้ผ่านอุปกรณ์แยกการเชื่อมต่อด้วยแสง ยิ่งไปกว่านั้น สิ่งนี้ไม่เพียงใช้กับวงจรควบคุมไตรแอคเท่านั้น แต่ยังรวมถึงวงจรควบคุมที่เป็นศูนย์ด้วย 
วิธีที่ค่อนข้างคลุมเครือในการเชื่อมต่อโหลด เนื่องจากในอีกด้านหนึ่งจำเป็นต้องมีส่วนร่วมอย่างแข็งขันของไมโครคอนโทรลเลอร์และการออกแบบวงจรที่ค่อนข้างซับซ้อน ในทางกลับกัน ช่วยให้คุณสามารถจัดการโหลดได้อย่างยืดหยุ่นมาก ข้อเสียอีกประการหนึ่งของการใช้ triac คือสัญญาณรบกวนดิจิตอลจำนวนมากที่สร้างขึ้นระหว่างการทำงาน - จำเป็นต้องมีวงจรปราบปราม
ไทรแอกมีการใช้กันอย่างแพร่หลาย และในบางพื้นที่ก็ไม่สามารถทดแทนได้ ดังนั้นการได้มาจึงไม่ใช่ปัญหา Triacs ประเภท BT138 มักใช้ในวิทยุสมัครเล่น
อ่านยัง...
- เวอร์ชัน: พื้นฐานของคำสอนที่แท้จริงของพระคริสต์คือประเพณีเวท
- ความเชื่อโบราณของชาวสลาฟ ความเชื่อของชาวสลาฟก่อนคริสต์ศาสนา
- "เครื่องบินใต้สะพาน": วันครบรอบการทำลายล้างการบินของไซบีเรีย
- ความโหดร้ายของลัทธิฟาสซิสต์: การฆาตกรรมเด็ก นักฆ่าเด็กฟาสซิสต์ - ประวัติศาสตร์ในภาพถ่าย - LiveJournal รัสเซียฆ่าเด็กของฟาสซิสต์